


据储能界了解到,
摘 要 重力储能具有安全性高、成本低、寿命长、存储能量无衰减、建设周期短及环境友好等优势。其中,斜坡式重力储能可以利用山体自然落差降低建设成本,并减少占用平地资源,是长时大容量储能领域的重要前瞻性技术之一。然而,斜坡式重力储能系统具有机械与电气动态高度耦合的特点,现有仿真模型难以完整描述其动态特性。针对该问题,本工作提出了一种斜坡式重力储能系统机械与电气联合仿真的多软件协同建模方法。首先,采用三维机械设计软件Solidworks建立包括斜坡、轨道、载重小车和质量块的机械系统框架模型;然后,将Solidworks中建立的模型导入多体动力学仿真软件Adams,并建立载重小车与链传动机构的联系,获得机械系统完整模型;最后,将Adams中的机械模型导入Simulink,并建立与电气模型的联系,从而获得机电联合仿真模型。将所提出的多软件协同仿真模型与Simulink独立仿真模型,在电网正常和异常工况下分别进行仿真对比,结果表明多软件协同仿真模型能够更加全面地描述斜坡式重力储能系统的动态特性。因此,多软件协同仿真模型能够更好地支撑对斜坡式重力储能的功率特性分析、安全性评估和机械参数优化设计等工作。
关键词 斜坡式重力储能;机电联合仿真建模;多软件协同仿真建模
随着“双碳”目标的提出,以新能源为主体的新型电力系统受到广泛关注。然而,含高比例新能源的电力系统存在电能供需不匹配的问题,需要配备经济高效的储能系统,以提高电力系统的效率与稳定性。
重力储能是一种利用固体质量块的重力势能进行电能存储和释放的储能方式,具有安全性高、成本低、寿命长、存储能量无衰减、建设周期短及环境友好等优势,可以满足大规模能量长时间储存的需求。与抽水蓄能相比,重力储能对于水资源匮乏的地区具有更强的适应性,且建设周期更短。与电化学储能相比,重力储能不存在自放电带来的能量损失,且具有更高的安全性。
按质量块运行方向分类,重力储能可分为垂直式与斜坡式两大类。与垂直式重力储能相比,斜坡式重力储能可以减少对平原土地资源的占用,并且可以利用山体自然落差降低单位储能容量的建设成本。目前,国内外对斜坡式重力储能的研究尚处于起步阶段。文献[12]提出了一种基于山体缆车的斜坡式重力储能方案,使重力储能系统可以适应陡峭的山体。文献[13]提出了一种在具有高度差的两个堆场之间铺设铁路轨道,并利用动力机车搬运质量块来实现充放电的方案,弥补了缆车方案单体载重小、功率密度低的劣势,但存在功率不连续的问题。中国科学院电工所提出了斜坡缆-轨式重力储能方案,结合了缆车式重力储能与铁轨式重力储能的优点,在保证功率连续性的同时提升了单体载重。美国ARES公司提出斜坡链-轨式重力储能方案,采用链条传动方式,由电机带动链轮使滚子链循环运行,从而拖动载重车辆运输质量块实现充放电。
虽然现有文献已提出多种斜坡式重力储能方案,但对于这些方案的性能,尤其是动态特性,还缺乏有效的仿真分析模型。文献[17]在MATLAB/Simulink软件中搭建了斜坡铁轨式重力储能系统仿真模型,研究了载重车辆质量、速度、斜坡坡度、斜坡高度和轮轨间滚动摩擦系数等关键因素对系统效率的影响。在Simulink中建立的仿真模型,一般是根据对象的微分方程或传递函数来构建相应的模块,能够较为准确地描述电气类对象。然而,对于机械类对象,只采用微分方程或传递函数难以全面描述机械部件之间的具体连接与耦合关系,因此无法准确模拟机械系统的动态特性。例如,对于链传动方式,由于存在“多边形效应”,运行过程中的速度和力矩存在周期性波动,会造成重力储能系统输出功率波动,并可能引发机械系统与电气系统之间的耦合振动。因此,对于斜坡式重力储能这类机械与电气动态高度耦合的系统,只采用MATLAB/Simulink软件进行仿真建模,难以完整模拟出系统的动态特性。
针对上述问题,本工作提出了斜坡式重力储能系统机械与电气联合仿真的多软件协同建模方法。采用三维机械设计软件Solidworks结合多体动力学仿真软件Adams,建立斜坡链-轨式重力储能系统机械部分的仿真模型;在Simulink软件中建立电气部分的仿真模型;通过在不同软件之间建立参数关联关系,实现多软件协同仿真,从而更全面地模拟斜坡式重力储能系统的机电耦合特性。将所提出的多软件协同仿真方法与Simulink独立仿真的方法对比,给出了两种仿真方法在正常运行工况与电网异常工况下的仿真结果差异。结果表明,本工作提出的多软件协同仿真方法,能够模拟出更加丰富的动态特性,因此更适用于对斜坡式重力储能系统进行功率特性分析、安全性评估和机械参数优化设计。
1 斜坡式重力储能系统结构
1.1 系统总体结构与工作流程
本工作所分析的斜坡链-轨式重力储能系统结构如图1所示,包括主轨道、返回轨道、上/下堆场水平传送带、上/下堆场龙门吊(下堆场的未画出)、斜坡牵引装置、质量块和载重小车。该系统储能/释能的工作流程如下:下/上堆场的龙门吊将质量块放置到载重小车上;载重小车进入主轨道,并与斜坡牵引装置的链条连接,之后沿主轨道上行/下行;到达上/下堆场后,龙门吊将质量块搬离载重小车;处于空载状态的小车被水平传送带送到返回轨道,并沿返回轨道返回原堆场开始新一轮循环。
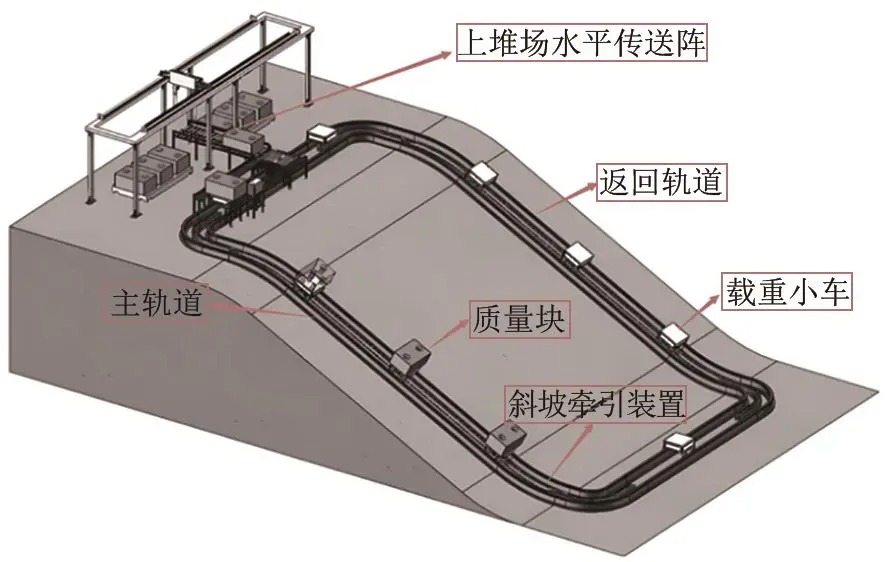
图1 斜坡式重力储能系统结构示意图
1.2 斜坡牵引装置结构
1.2.1 机械系统
斜坡牵引装置是斜坡链-轨式重力储能系统的核心,其机械部分的三维模型如图2所示,具体包括链轮、滚子链、链条底座、工字轨道。其中,链轮与滚子链的机械耦合方式如图3所示。
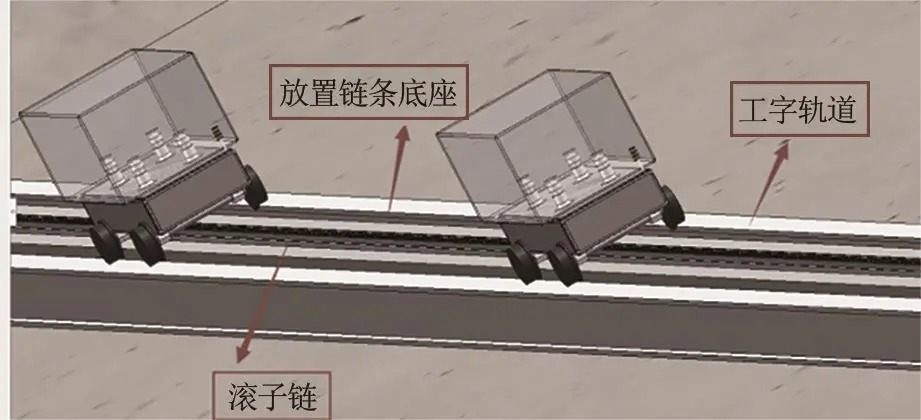
图2 斜坡牵引方式三维模型
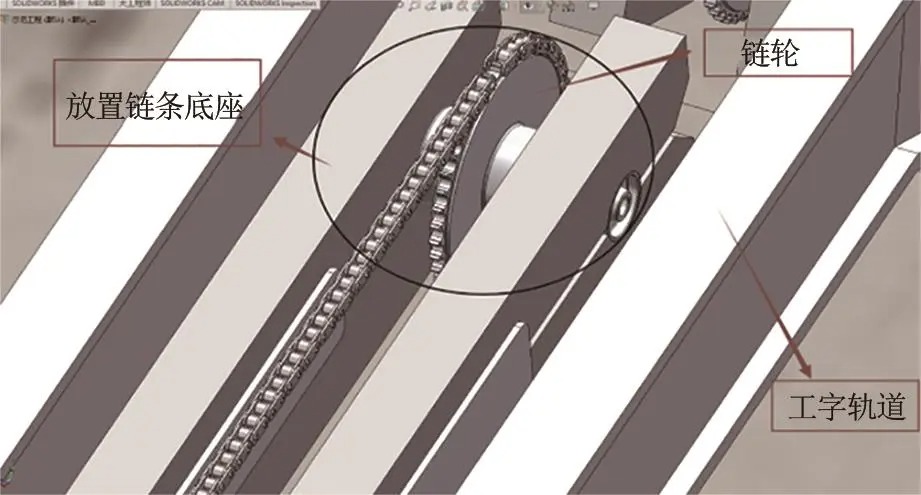
图3 链传动三维模型
1.2.2 电气系统
为降低重力储能系统成本,避免使用大功率电力电子变换器,采用直接并网的电励磁同步电机为斜坡牵引装置提供动力。同步电机主轴经齿轮变速箱驱动链轮转动,定子绕组经变压器升压后接入电网,如图4所示。

图4 重力储能系统并网方式
2 机电联合仿真模型建立
2.1 机械系统仿真模型
由于斜坡牵引装置是重力储能系统机电能量转换的关键环节,本工作重点对斜坡段及其牵引装置进行建模分析。首先,在Solidworks软件构建斜坡、轨道、质量块和载重小车模型,并通过建立机械连接关系获得三维模型,如图5所示。然后,将Solidworks中建立的模型导入Adams软件,在Adams中完成链轮、滚子链与载重小车底部挂钩之间的机械装配,得到整个机械系统的仿真模型,如图6所示。
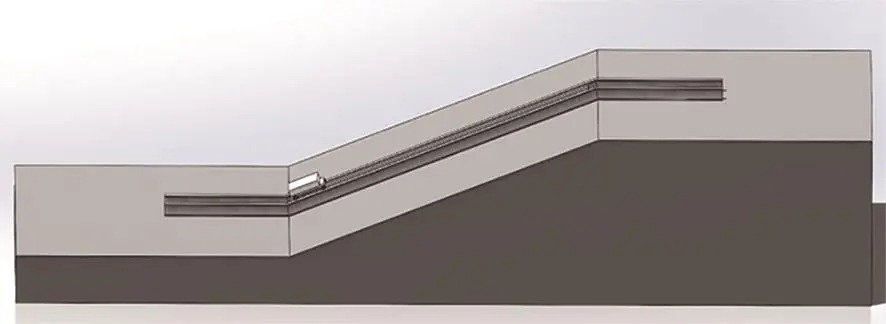
图5 在Solidworks中建立的斜坡、轨道、质量块与载重小车模型
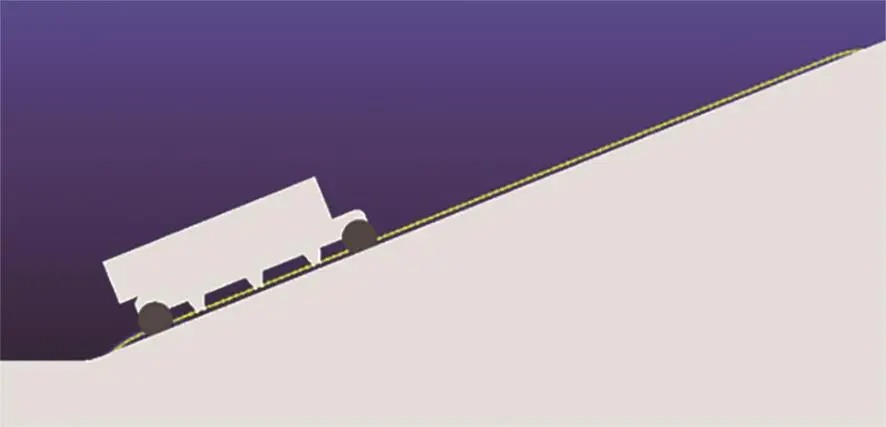
图6 在Adams中建立的机械系统仿真模型
2.2 电气系统仿真模型
在本研究的重力储能系统中,电励磁同步电机是机械与电气能量转换的核心。考虑到质量块进入/离开斜坡时的负载突变可能引发同步电机振荡,因此采用带阻尼绕组的电励磁同步电机以提高稳定性。电机数学模型如下:
定子绕组电压方程如下:
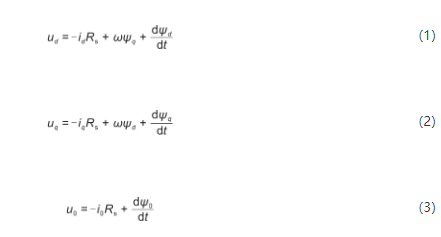
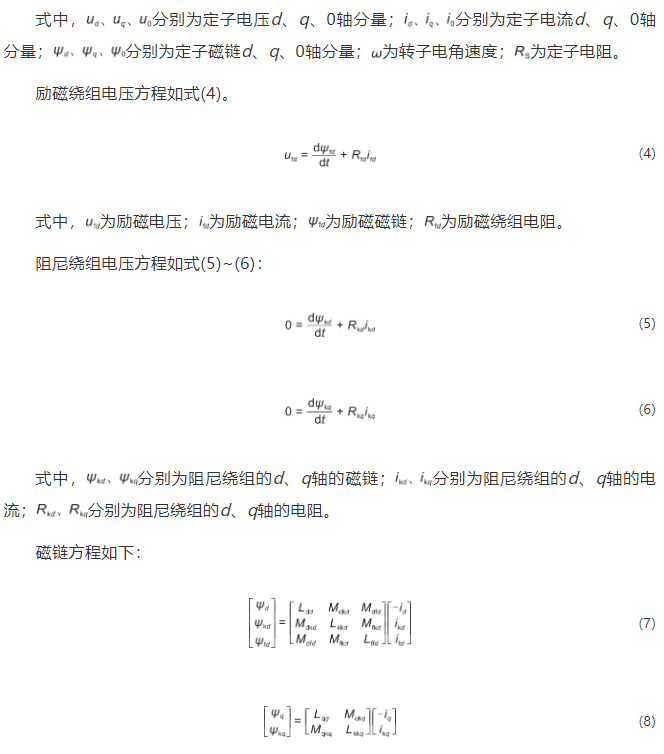
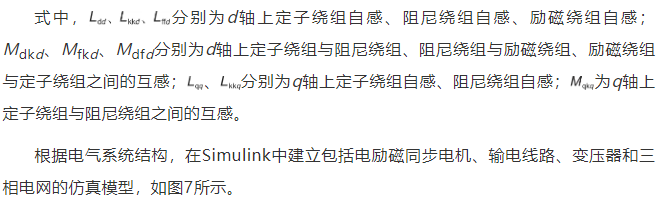

图7 电气系统仿真模型
2.3 机电联合仿真模型建立
将建好的机械系统模型从Adams导入Simulink,获得Simulink中机械系统仿真模型如图8所示。其中,adams_sub模块为主仿真模块,State-Space模块和S-Function模块分别为机械系统对应的状态空间模型和S函数模型。为了获得最接近真实情况的仿真效果,本工作采用主仿真模块adams_sub与电气系统连接,构建斜坡牵引装置的机电联合仿真模型。如图9所示,电气模型中电励磁同步电机的转速输入机械模型,机械模型产生的机械功率输入电气模型中的电励磁同步电机,由此建立起机械模型与电气模型之间的关联关系。
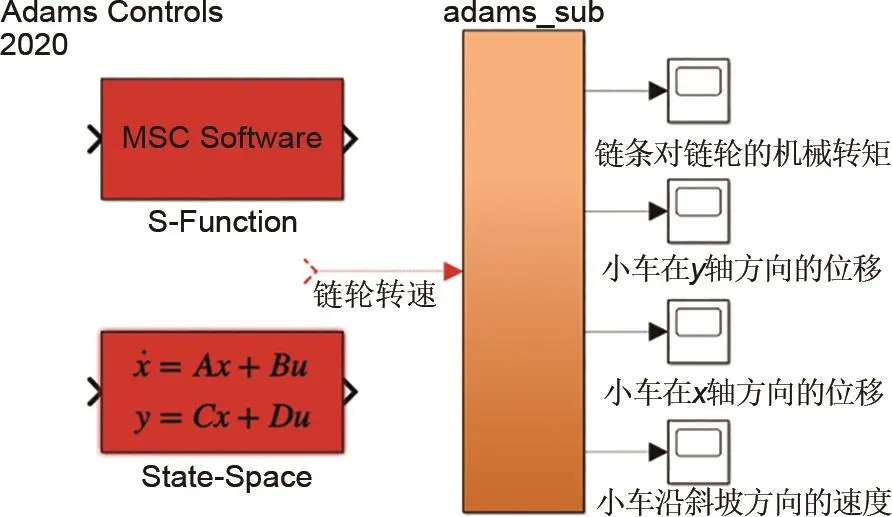
图8 在Simulink中的机械仿真模型
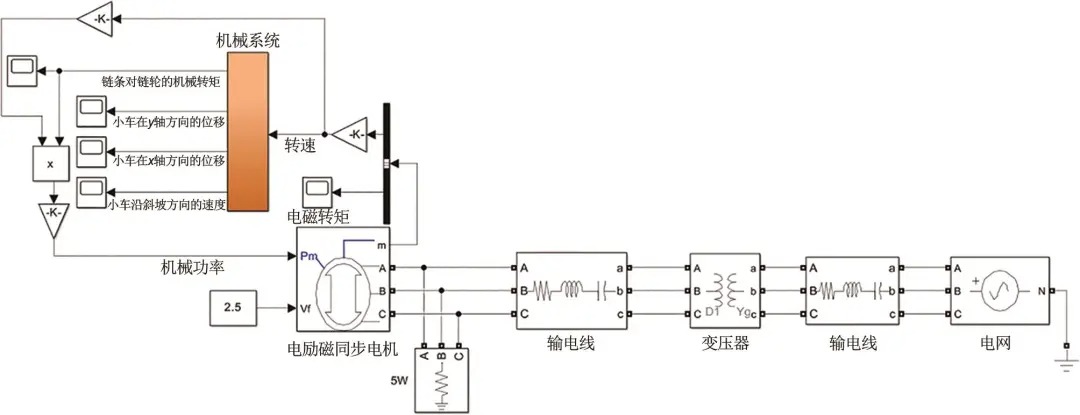
图9 机电联合仿真模型
综上,基于多软件协同建模的斜坡式重力储能系统机电联合仿真模型,建模步骤如图10所示。
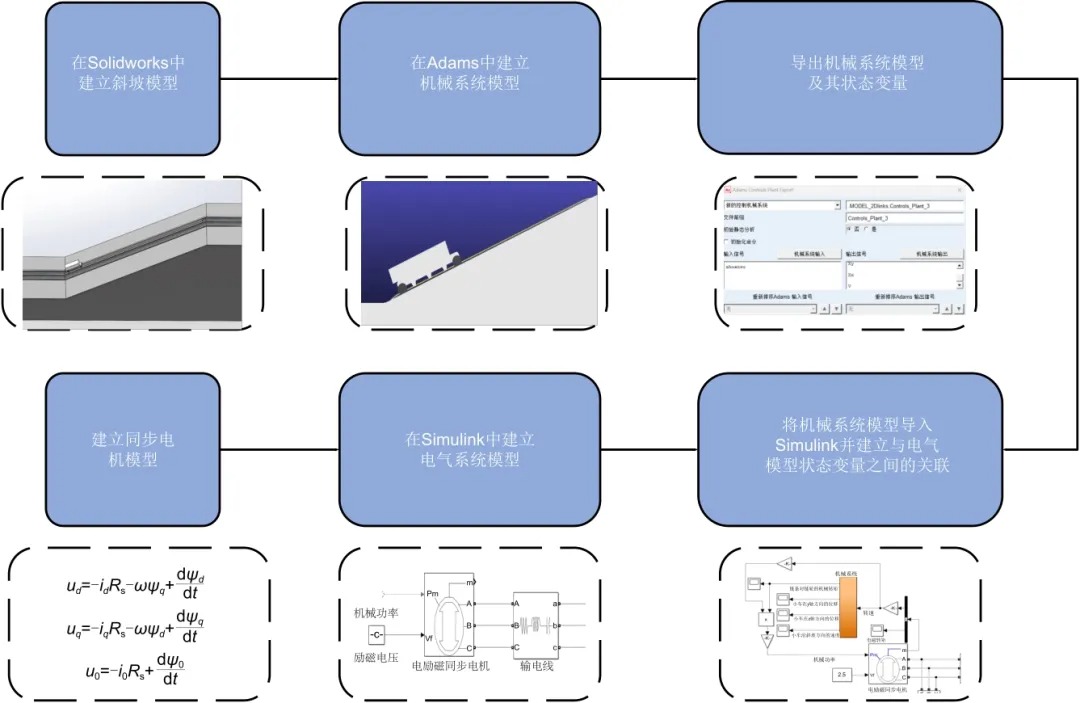
图10 多软件协同仿真建模步骤
3 仿真分析
3.1 仿真参数
为验证本工作提出的斜坡式重力储能系统机械与电气联合仿真的多软件协同建模方法能够更加全面地模拟系统的动态特性,将多软件协同仿真与Simulink独立仿真的结果进行对比。采用Simulink中Chain Drive、Vehicle Body、Tire模块分别模拟链传动系统、质量块、小车,构建可在Simulink中单独运行的仿真模型,与多软件协同仿真模型进行对比分析。
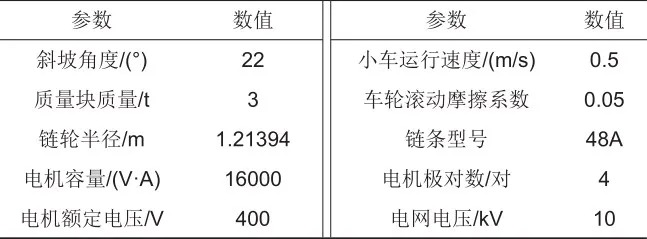
在仿真模型中,定义向上拉升小车的转矩为正转矩,定义小车沿斜坡下行时的速度为正速度。两种仿真方案的机电参数一致,如表1所示。
表1 机械和电气模型参数
3.2 模型可信度分析
考虑到Adams作为成熟的商用化软件,其仿真结果应具有高可信度。因此,首先在Adams软件中单独对机械模型进行仿真,并与本工作所提出的多软件协同仿真结果进行对比。由于Adams中没有同步电机模型,无法对电气系统进行仿真,因此只能根据电机的同步转速设定链轮转速,使链轮以恒定速度旋转。图11为储能工况下的仿真结果对比,图12为释能工况下的仿真结果对比。可见,Adams单独仿真与多软件协同仿真的结果,在平均值和动态特性上有较高的相似度,但由于Adams单独仿真时链轮速度为给定常数,而多软件协同仿真时链轮转速取决于同步电机转速,导致仿真结果略有差异。因此,本工作所提出的多软件协同建模方法具有较高的可信度。
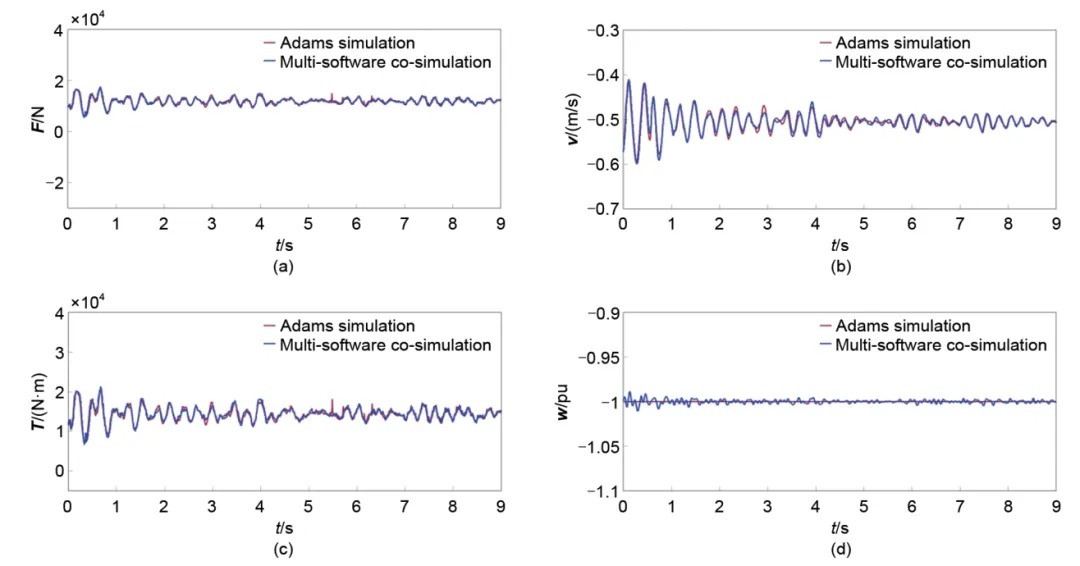
图11 储能过程仿真结果对比:(a) 链条拉力;(b) 小车移动速度;(c) 链轮上的机械转矩;(d) 链轮角速度
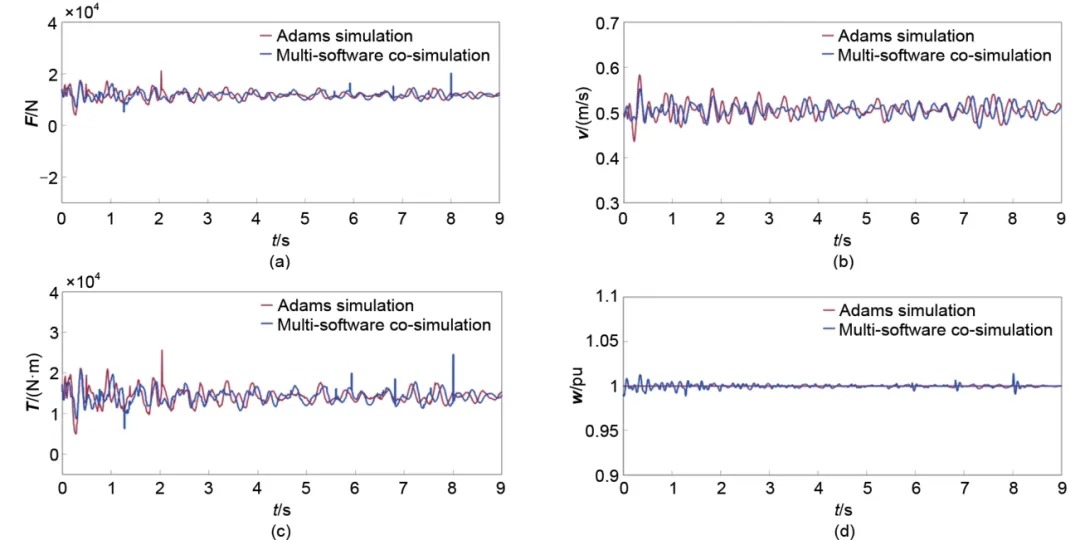
图12 释能过程仿真结果对比:(a) 链条拉力;(b) 小车移动速度;(c) 链轮上的机械转矩;(d) 链轮角速度
3.3 正常工况仿真结果对比
储能工况下,同步电机从电网吸收有功功率,运行于电动状态,通过主轴带动链轮转动,从而产生沿着斜坡向上的拉力拖动载重小车沿斜坡轨道运输质量块,如图13所示。释能工况下,载重小车因重力沿斜坡下行,通过滚子链带动链轮以及同步电机转动,此时同步电机运行于发电状态,向电网输出有功功率,如图14所示。由图13和图14可见,在储能和释能工况下,电机转速均维持在同步转速附近,使载重小车以0.5 m/s左右的速度沿着斜坡轨道运输质量块,此时链条上的拉力约为15000 N。对比多软件协同仿真与Simulink独立仿真的结果,发现两种仿真方式下系统各变量的均值接近,但多软件协同仿真下所有变量均存在一定程度的波动。多软件协同仿真结果存在的转矩、转速和功率波动,主要源于链传动“多边形效应”导致的动载荷,以及由此引发的复杂机电耦合振动模态。在链传动系统中,主动链轮的角速度、链节距、链轮齿数,都会影响动载荷的大小,从而影响波动的幅度。可见,由于多软件协同仿真能够体现链传动“多边形效应”引发的转矩、转速和功率波动,因此能更加全面地描述重力储能系统的动态特性,也更加适用于系统的功率特性分析和机械参数设计。
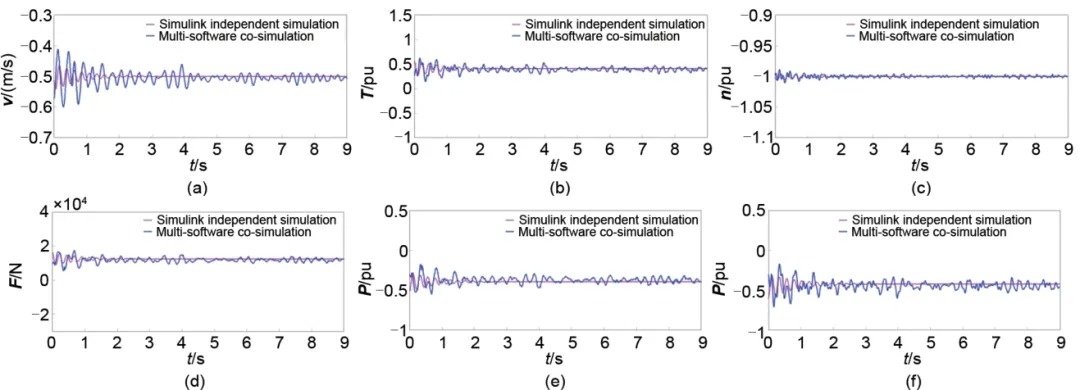
图13 正常工况下储能过程的仿真结果对比:(a) 小车移动速度;(b) 电机电磁转矩;(c) 电机转速;(d) 链条拉力;(e) 电机主轴机械功率;(f) 电机定子绕组有功功率
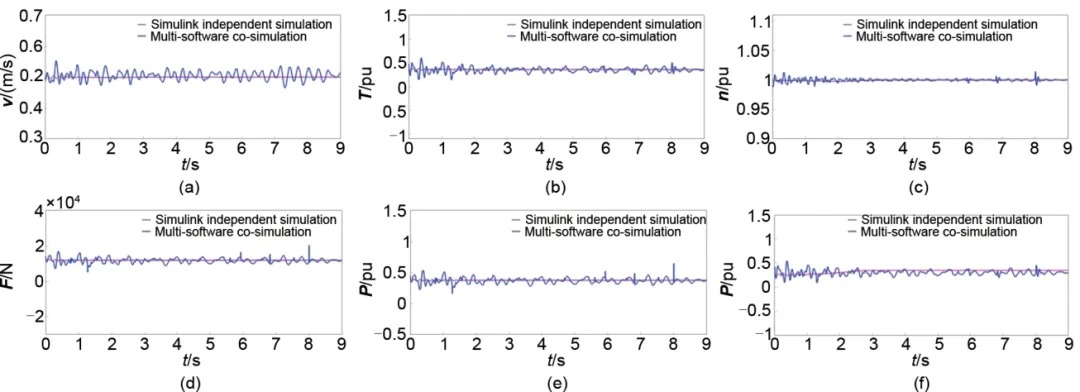
图14 正常工况下释能过程的仿真结果对比:(a) 小车移动速度;(b) 电机电磁转矩;(c) 电机转速;(d) 链条拉力;(e) 电机主轴机械功率;(f) 电机定子绕组有功功率
3.4 异常工况仿真结果对比
准确模拟重力储能系统在电网电压跌落故障下的运行状态,对于重力储能系统的安全性评估至关重要。本工作将分别对两种仿真方法在电网电压幅值跌落40%和50%时的仿真结果进行分析对比,如图15~18所示。
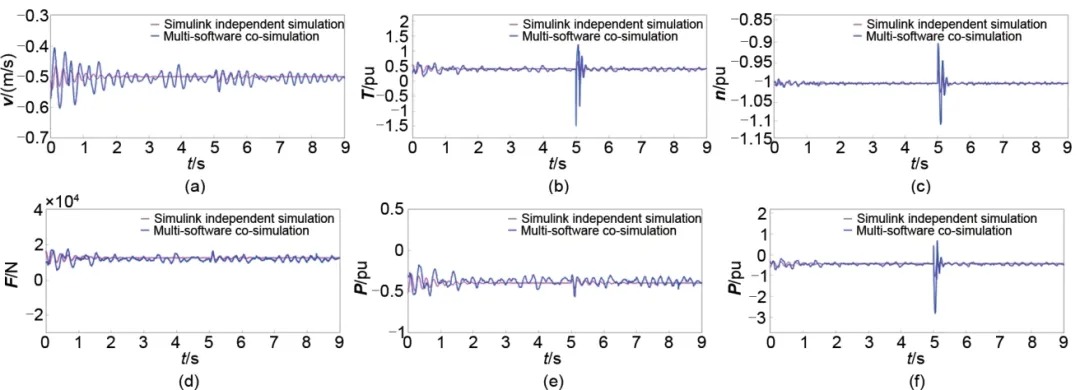
图15 储能工况下电压跌落40%仿真结果对比图:(a) 小车移动速度;(b) 电机电磁转矩;(c) 电机转速;(d) 链条拉力;(e) 电机主轴机械功率;(f) 电机定子绕组有功功率
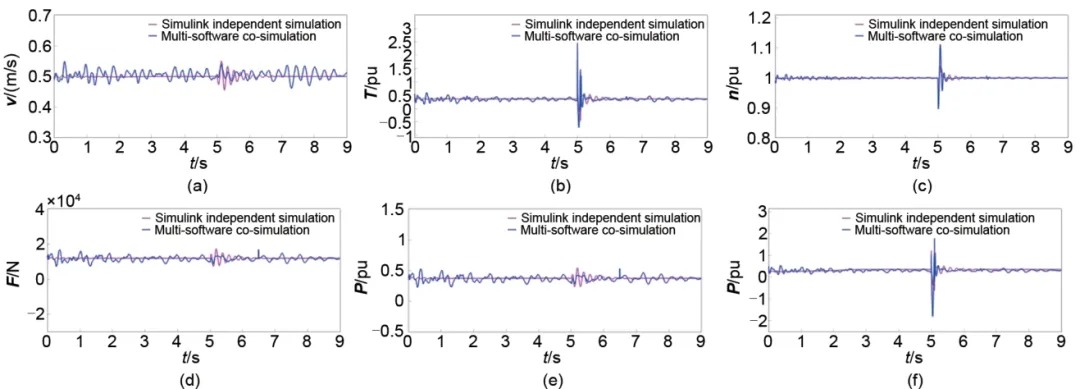
图16 释能工况下电压跌落40%仿真结果对比图:(a) 小车移动速度;(b) 电机电磁转矩;(c) 电机转速;(d) 链条拉力;(e) 电机主轴机械功率;(f) 电机定子绕组有功功率
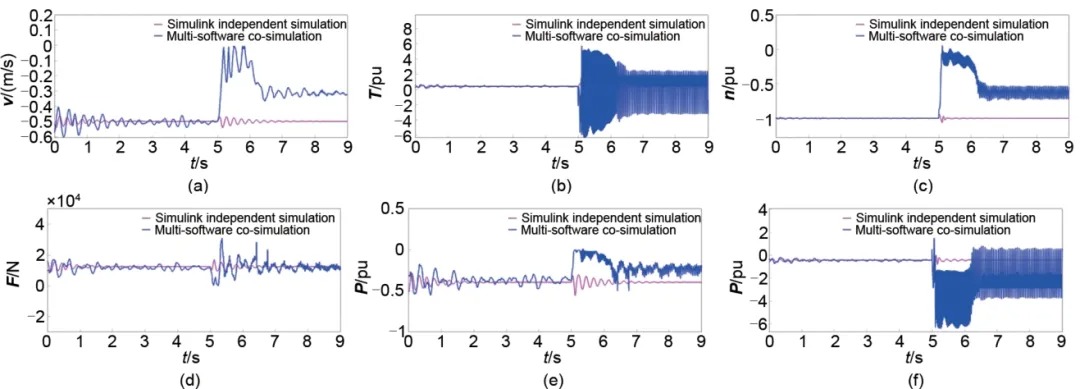
图17 储能工况下电压跌落50%仿真结果对比图:(a) 小车移动速度;(b) 电机电磁转矩;(c) 电机转速;(d) 链条拉力;(e) 电机主轴机械功率;(f) 电机定子绕组有功功率
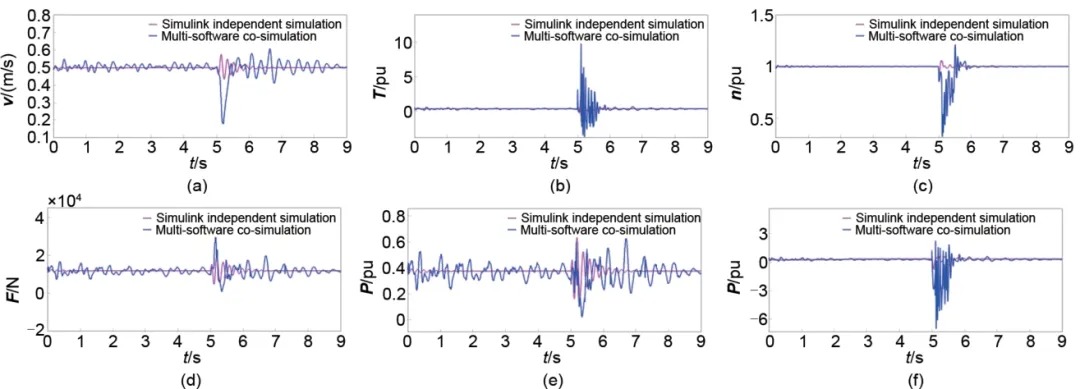
图18 释能工况下电压跌落50%仿真结果对比图:(a) 小车移动速度;(b) 电机电磁转矩;(c) 电机转速;(d) 链条拉力;(e) 电机主轴机械功率;(f) 电机定子绕组有功功率
图15和图16分别给出了储能和释能工况下,电网电压跌落40%时的仿真结果。其中,在第5 s时电网电压幅值发生跌落,持续0.1 s后恢复至额定电压。可见,在40%的电压跌落幅度下,重力储能系统在经过一段时间的振荡后,能恢复到故障前的状态。将多软件协同仿真与Simulink独立仿真结果进行对比,可以发现多软件协同仿真下重力储能系统的转矩、转速和功率冲击明显大于Simulink独立仿真。可见,多软件协同仿真能够更全面地模拟电压跌落期间重力储能系统机械与电气模型之间耦合关系引发的振荡特性。
图17给出了储能工况下电压幅值跌落50%时的仿真结果,两种仿真方法的结果存在较大差异。由于多软件协同仿真模型能够准确地模拟出质量块重力对小车和同步电机的制动作用,可以看到电压跌落期间,小车和同步电机的速度迅速下降,导致同步电机失步,引发电磁转矩、转速和功率的大幅振荡。虽然在阻尼绕组作用下,电机转速有一定程度提升,但最终也无法回到同步转速。
图18给出了释能工况下电压幅值跌落50%时的仿真结果。此时同步电机运行于发电状态,其电磁转矩为制动力矩,端电压跌落引发的定子绕组短路电流使电磁转矩突增,导致电机和小车速度下降。与储能工况的不同之处在于,释能工况下小车可以在自身重力作用下加速,从而将同步电机重新拉回同步转速,因此系统最终能恢复稳定运行。
综上可见,对于斜坡式重力储能这类机械动态与电气动态高度耦合的系统,采用多软件协同仿真能够更准确地模拟系统的动态特性,因此能更好地对系统在电网异常时的运行状态进行安全性评估。
4 结 论
针对斜坡式重力储能系统机械与电气动态高度耦合的特点,本工作提出了斜坡式重力储能系统机械与电气联合仿真的多软件协同建模方法,旨在更加全面地描述其机电耦合特性。首先,在Solidworks中搭建了包括斜坡、轨道、质量块和载重小车的模型机械系统框架。然后,将Solidworks中建立的模型导入Adams,并在Adams中建立链传动机构与载重小车之间的联系,获得机械系统的完整仿真模型。最后,将Adams中的机械模型导入Simulink并建立与电气模型之间的联系。在电网正常和异常工况下,分别将所提出的多软件协同仿真模型与Simulink独立仿真模型进行对比。结果表明,链传动“多边形效应”导致的动载荷,以及由此引发的复杂机电耦合振动模态,使斜坡式重力储能系统存在转矩、转速和功率波动,该波动可以通过多软件协同仿真模型进行模拟。因此,多软件协同仿真模型能更全面地描述斜坡式重力储能系统的动态特性,从而更好地支撑功率特性分析、安全性评估和机械参数优化设计等工作。

评论